

汽车功能安全研究:升级强制国标全面强化功能安全(FuSa)与预期(SOTIF)必威官方网站- Betway必威- APP下载要求
2026-03-13必威官方网站,Betway必威,必威APP下载2026年,中国密集出台并推进多项智能汽车强制性国家标准,全面强化了功能安全(FuSa)与预期功能安全(SOTIF)要求,为智能汽车划定了明确的安全底线年中国主要功能安全相关的汽车强制性标准
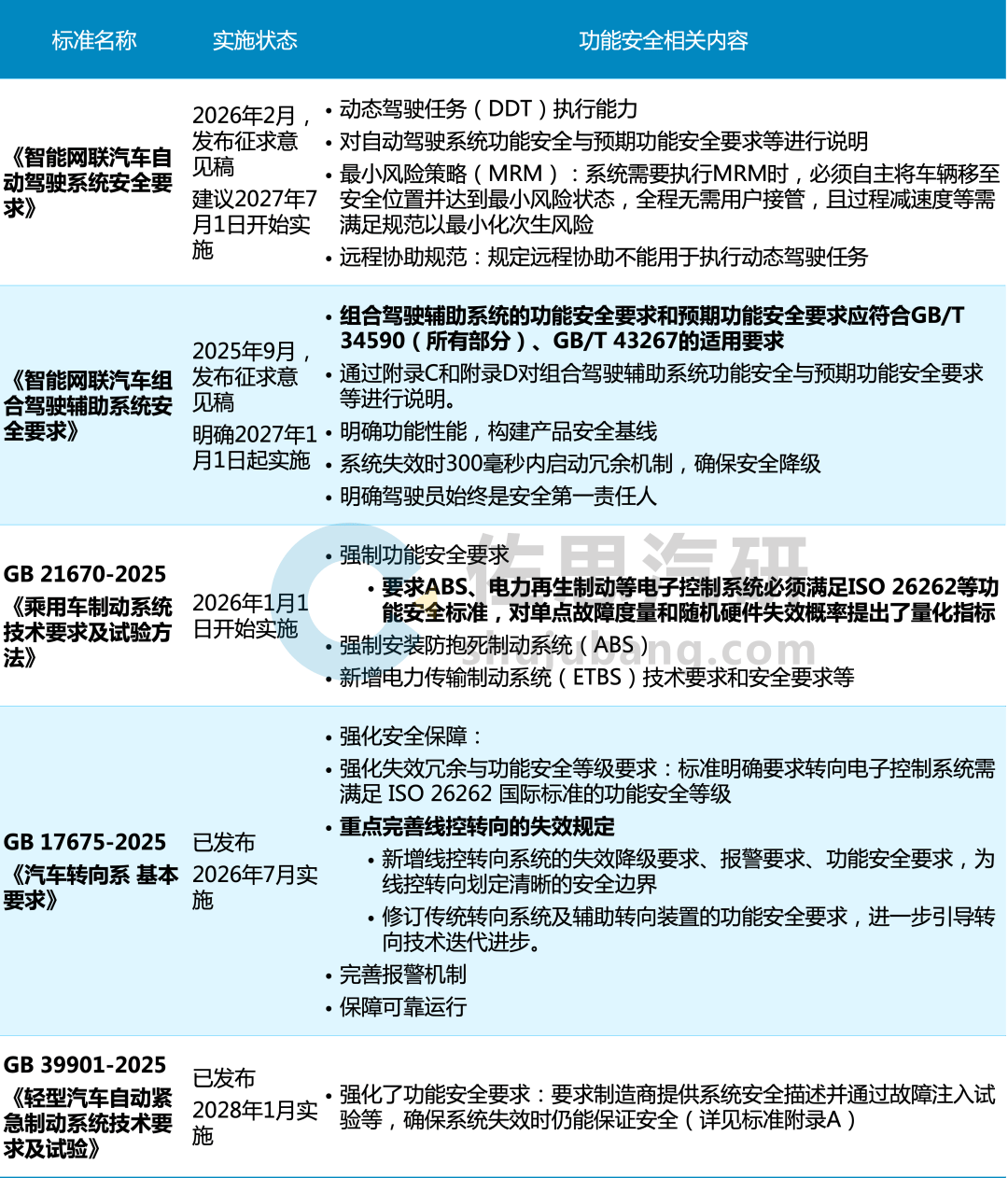
如2025年9月,工信部发布《智能网联汽车组合驾驶辅助系统安全要求》征求意见稿,是中国首个针对 L2 级驾驶辅助系统的强制性国家标准,指出组合驾驶辅助系统的功能安全要求和预期功能安全要求应符合GB/T 34590(所有部分)、GB/T 43267的适用要求。并通过附录C和附录D对组合驾驶辅助系统功能安全与预期功能安全提求进行说明。根据标准,组合辅助驾驶法规首次将功能安全要求从推荐性标准升级为强制性准入条件。主流车企在开发 L2及L2 +及以上产品时,已普遍将 ISO 26262 功能安全要求作为标配,以满足当前监管要求和未来的合规预期。
2026年2月,工信部发布《智能网联汽车 自动驾驶系统安全要求》征求意见稿,将代替GB/T 44721—2024《智能网联汽车 自动驾驶系统通用技术要求》成为首部针对L3级和L4级自动驾驶系统的强制性国家标准,标准对智能网联汽车自动驾驶系统的技术要求、保障要求、同一型式判定,描述了相应的保障要求检验、安全档案检验和确认性试验等方法。对L3/L4级自动驾驶系统相关危害功能安全目标作出明确要求。

2025年12月,中国首批L3级有条件智能驾驶车型正式获得准入许可,极狐阿尔法S6(L3版)、长安深蓝SL03分别在北京、重庆指定区域开展上路试点,标志着中国乘用车市场L3级有条件智能驾驶开始落地。
:考虑到拥堵工况下驾驶员易疲劳的特点,采用渐进式预警策略,从轻微提示到强烈报警逐步升级。长安汽车L3级自动驾驶车型全生命周期功能安全策略
除长安、北汽外,理想、比亚迪、小鹏、小米、岚图等车企也正在积极开展L3级有条件智能驾驶车型道路测试,推进旗下L3级车型上路试点进程。
2025年4月,面向L3智驾,东风岚图汽车发布首个L3级智能架构——天元智架,其融合了青云L3级智能安全行驶平台、鲲鹏L3级高阶智能安全驾驶系统两大核心智能化技术集群。在功能安全设计层面,该架构满足汽车功能安全最高等级ASIL-D的要求,在硬件层面实现了全链路备份设计,从传感器、通讯通道到计算芯片和线控底盘关键执行部件均采用双备份设计,确保在单一系统失效的情况下,车辆仍能维持基础的安全行驶能力。在系统化主动智能安全方面,鲲鹏L3级智驾通过全域融合的智能推理和自主学习,实现了从被动安全到主动安全的跨越。
另外,人机安全设计方面,打造了三级递进式预警机制:在系统遇到特殊情况,需要人为接管时,车辆将通过车内灯光闪烁、语音和座椅振动三级递进式预警。如果长时间无人接管,车辆会自动安全停靠,遇到人多的复杂交通环境时,车辆将通过外置扬声器和灯光提醒车外人员注意安全。
(ISO 26262)等功能安全国际标准,并达到相应的ASIL等级(通常是高等级如D级)。
:明确要求转向系统在失效后必须具备冗余备份能力,确保车辆能进入安全状态。
:针对全动力转向系统,详细规定了在动力源失效、控制信号传输失效、储能不足等多种失效场景下的安全策略、降级流程和报警机制。
线控转向功能安全达标的核心重点是:在强制ASIL D等级的框架下,通过异构的、全冗余的硬件和软件设计,配合毫秒级的故障诊断与处理机制,并经过极其严苛的故障注入和冗余切换验证等,最终确保在任何单一甚至多个合理可预见故障发生时,系统仍能维持可控的转向功能或安全停车。作为未来智能汽车发展的热点技术之一,主要供应商和主机厂积极布局合规的线控转向系统产品。
采埃孚智能底盘2.0中的转向系统完全取消了转向柱,通过方向盘执行器、冗余转向前轴执行器及自研的车辆运动控制软件cubiX的协同运作,实现转向指令的全电信号传递。在安全层面,全冗余设计满足ASIL D级安全标准,配合取消的万向节中间轴带来的空间优势,碰撞时能有效降低腿部伤害风险。同时,系统内部包含了两套异构软件和硬件作为冗余。当其中一套系统意外失效时,另一套系统自动无缝连接,依然可以让车辆实现完整的转向功能。
小米汽车发布的智能底盘预研技术中,小米48V线控转向系统方向盘和车轮之间没有机械连接,转向比可在 5:1-15:1 之间无级调节,兼顾了低速转弯的灵活性与高速变道的稳定性,可实现无方向盘座舱布局,使用“线”连接,实现人机解耦,原生支持完全自动驾驶,其设计满足行业最高功能ASIL D安全等级标准。
随着AI大模型、AI Agent等在汽车领域的广泛应用,自动驾驶、智能座舱等功能逐渐普及,汽车AI系统安全问题成为关注重点。如AI系统的不可解释性、数据依赖性以及潜在的系统性失效等问题,促使亟待解决对AI系统应用汽车的安全问题。
2025年1月, ISO推出AI系统安全的统一的安全标准ISO/PAS 8800:2024,旨在规范汽车领域中AI技术的应用,确保其安全性、可靠性和兼容性,与ISO2626汽车功能安全、ISO21448以及信息安全等协同推动AI系统安全的发展。
,为智能汽车安全发展提供全链条技术支撑。针对AI电气架构呈现的应用驱动、分层解耦、安全融合、创新扩展等特征,经纬恒润提出统一定义安全框架方案,将AI系统的软件功能安全落地抽象为安全通信、安全隔离、安全监控、安全执行四大关键技术,通过平台化功能安全中间件及安全组件技术,显著降低实施难度。经纬恒润汽车AI安全解决方案
2025年8月,面向高度自动驾驶(L3-L5)系统AI模型安全等挑战,雅析上海连同赛威科提出分布式权重孪生(DWT)技术创新方案,来解决自动驾驶AI冗余开发难题,DWT技术可将单一E2E模型裁剪为协同运行的“双胞胎模型”,通过权重镜像同步(WMR)非对称硬件部署、神经桥接技术等核心技术实现安全冗余,通过DWT实现40%降本与99.99%+故障覆盖率。
全球道路车辆功能安全标准:ISO2626:2018汽车安全完整性等级(ASIL)
中国道路车辆功能安全标准: GB/T 34590:2022-芯片功能安全
中国道路车辆功能安全标准:GB/T 43253 道路车辆功能安全审核及评估方法
L2级组合驾驶辅助系统功能安全方案:智慧巡航ICC系统功能安全目标与机制
典型L4自动驾驶系统功能安全设计: Fail-operational 架构与备份系统
L4级自动驾驶系统功能安全设计方案:北汽L4级Robotaxi功能安全设计
L4级自动驾驶系统功能安全设计方案:广汽L4级Robotaxi自动驾驶功能安全设计
L4级自动驾驶系统功能安全设计方案:小鹏汽车L4级Robotaxi功能安全设计
L4级自动驾驶系统功能安全设计方案:百度L4级自动驾驶整体系统安全设计思路
智驾域的功能安全设计方案:华为智驾域控制器MDC610 Pro功能安全设计
汽车智能底盘系统功能安全设计方案:宁德时代CIIC一体化中型平台获得ASIL D认证(1)-(2)
线控制动系统(EMB)功能安全设计方案: 辰致科技EMB控制模块功能安全设计
线控制动系统功能安全设计方案:辰致科技集成式制动控制模块IBCU获得ASIL D产品认证
线控制动系统(EHB)功能安全设计方案: One-box方案,博世IPB+RBU
线控制动系统(EHB)功能安全设计方案: Two-box方案,亚太机电制动系统
线控转向系统功能安全方案: J-EPICS(JTEKT电子智能控制转向系统)
线控转向系统功能安全方案: JTEKT电子智能控制转向系统-JFOPS 故障运行系统
电动汽车驱动系统功能安全验证体系:新能源汽车电安全技术验证体系(NESTA 2026版)
电动汽车分布式驱动系统的功能安全策略:驱动系统容错控制策略(1)-(2)
主要主机厂线控驱动系统(四电机独立驱动)方案与功能安全策略(1)-(2)
电动汽车分布式驱动系统功能安全方案:华为DriveONE融合驱动 ASIL D功能安全
电动汽车分布式驱动系统功能安全方案:华为DriveONE运动域1.0-2.0
电动汽车电源系统配电功能安全设计方案:金脉电子智能配电ASIL D 功能安全设计
汽车电池管理系统BMS功能安全设计方案:尊界S800 电池BMS功能安全设计
汽车电池管理系统BMS功能安全设计方案:特斯拉Model 3高压BMS系统
汽车电池管理系统BMS功能安全设计方案:联合电子500V BMS 8.5.1
中央+区域( CCU+ZONAL )架构下硬件功能安全方面的挑战及应对方式
中央+区域 EEA架构功能安全方案:双SOC(ORINX+高通8295)舱驾融合计算平台
3.1 趋势一:功能安全、预期功能安全、AI安全等在内的全栈安全融合布局趋势
趋势一:功能安全+预期功能安全+网络信息+AI安全等全面安全融合布局发展
汽车融合安全布局类型一: AI安全+功能安全+预期功能安全+信息安全+ASPICE等安全融合建设
汽车融合安全布局类型一: AI安全+功能安全+预期功能安全+信息安全+ASPICE等安全融合建设
汽车融合安全布局类型一: AI安全+功能安全+预期功能安全++信息安全+ASPICE等安全融合建设
汽车融合安全布局类型四: ASPICE集成功能安全、网络安全融合系统开发
汽车融合安全布局类型五:ASPICE+功能安全+预期功能安全+网络安全融合
车用AI系统功能安全挑战: VLA视觉语言动作大模型的安全挑战与典型措施
AI赋能汽车功能安全的解决方案:经纬恒润功能安全智能体产品HIRAIN FuSa AI Agent
AI赋能汽车功能安全的解决方案:博世机器学习开发V模型流程——数据驱动工程流程DDE
AI赋能汽车功能安全的解决方案:博世机器学习开发V模型流程——ODD是DDE流程起点
AI赋能汽车功能安全的解决方案:博世机器学习开发V模型流程—— DDE的V模型
AI赋能汽车功能安全的解决方案:博世机器学习开发V模型流程——DDE解决ML系统的安全挑战
AI赋能汽车功能安全的解决方案:博世机器学习开发V模型流程—— 容错机制中集成AI
长安汽车智驾域控功能安全设计策略:SOC与MCU互相监测实现安全冗余目的
长安汽车动力系统功能安全设计策略:智慧新蓝鲸3.0(动力+底盘+智舱+云)
上汽智己汽车功能安全与预期功能安全方案部署现状及趋势:车门、驱动、电池等
